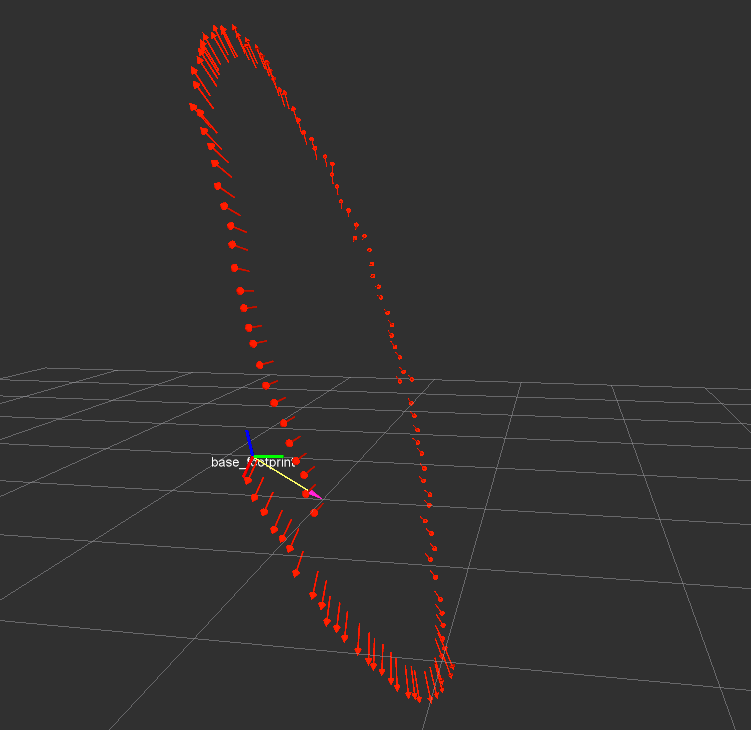
After I rotated the transforms between base and camera, by roughly the correct estimates for the test platform, the second pass on the data looks much more promising. At least the nodes are upright and moving in the right directions.

The above is with no IMU data - that's obviously the next step. I have to say, not too bad for just a visual odometer from an 'okay' first pass calibrated camera that was build for under $20. It is about a 3m loop with lots of bumpy camera data in the mix. The camera bounced a little (as you can see) on mount to the test platform (which could use improvement).
EKF helps a little

EKF helps a little
No comments:
Post a Comment